電子情報通信学会ヒューマンプローブ研究会第24回研究発表会でM2の大石君と齋藤君が以下の発表をしました.
- 斎藤光明,藤波香織;“携帯機器の所持位置認識対象を逐次追加する機構の実利用を想定した評価”,電子情報通信学会 ヒューマンプローブ研究会 第24回研究発表会,pp. 23-30, 2021年3月3日.
- 大石征裕,辻愛里,藤波香織;“腹囲形状計測のためのベルト型デバイス”,電子情報通信学会 ヒューマンプローブ研究会 第24回研究発表会予稿集,pp. 31-38, 2021年3月3日.
Daily Life Computing Laboratory@Tokyo University of Agriculture and Technology
電子情報通信学会ヒューマンプローブ研究会第24回研究発表会でM2の大石君と齋藤君が以下の発表をしました.
次の5件の卒論の発表が行われ合格しました.
修士2年の齋藤君の論文がSensors誌に採録されました.
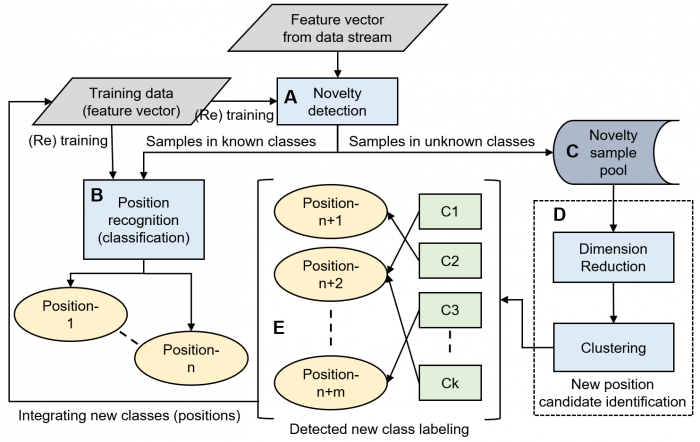
この論文は以下の携帯機器の所持位置逐次追加フレームワークの図中で,CとDの部分の実現方法に焦点を当てた研究です.新規性検出(A)で未知位置と判定されたデータがNovelty sample pool(C)に蓄積され,Dにおいてクラスタ数をあらかじめ決める必要がないクラスタリング手法であるDBSCANを用いて1つ以上の新規(未知)の所持位置を検出するというものです.新規の所持位置が検出されれば,あとは利用者に正解ラベル付けを依頼することで,利用中にその人特有の所持位置をシステムに追加して利用できるようになります.
なお,Aの構成方法については以下の論文で述べています.
Dの予備検証は以下の論文で述べています.
次の修士論文5件の発表が行われ審査に合格しました.
東京農工大学内 農工融合研究支援制度(通称TAMAGO)に,藤波が分担者として参加する研究「One Health実現のための人と動物の対話的関係額」(代表:新村毅 農学研究院准教授)が採択されました.(産学連携室による紹介)
藤波班は,ヒヨコの群れの状態のセンシングと親鶏ロボットの制御機構の開発を担当します.
辻愛里助教が研究室に加わりました.
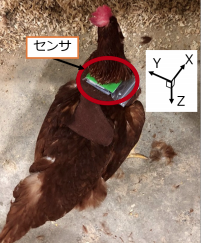
(公財)栢森情報科学振興財団の2020年度研究助成に藤波が代表をつとめる“鶏の住環境の快適性向上に向けた動物行動学的分析を支援する鶏行動の認識システム”の研究課題が採択されました.2019年度より農学部と共同で実施している鶏の行動認識について,研究者のツールとして使えるようなものを目指していきます.
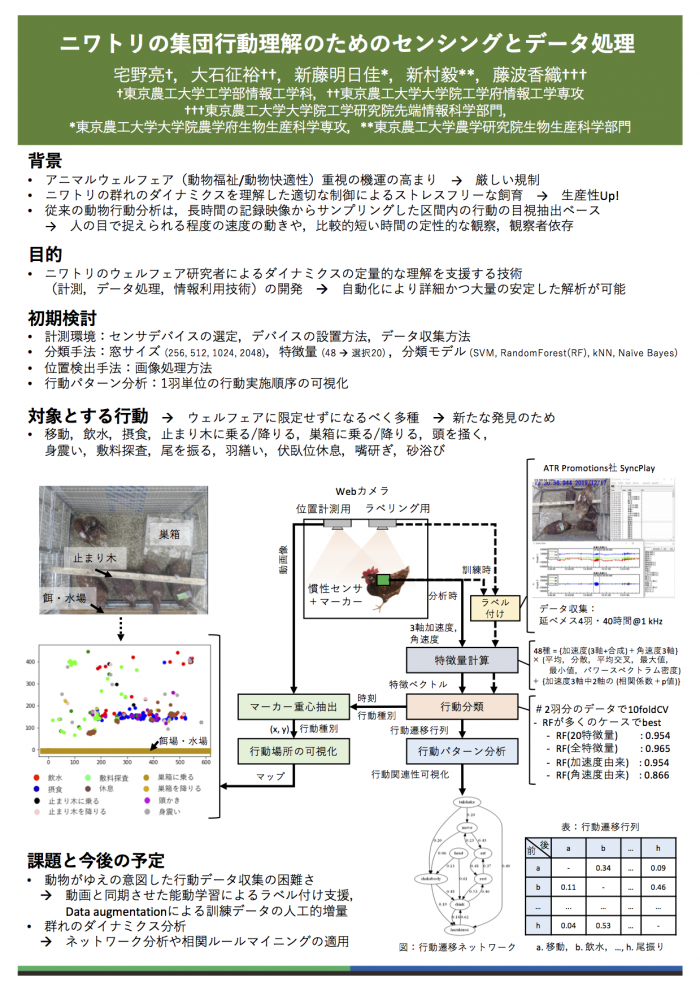
M1の宅野君が情報処理学会UBI研究会第67回発表会において,以下のタイトルの研究発表を行いました.本発発表は5月の第66回発表会で発表したものうち,慣性センサによる行動認識機能について個体数を8羽に,認識対象行動も26種(うち11種は重要ではないものの頻繁に見られた行動で「その他」と集約可能なもの)に増やした場合の分類器(特徴量選定も含む)の実現方法についてのものです.
本研究室からの論文2篇が論文誌(Sensors and Materials)に採録され,オンラインで公開されました.
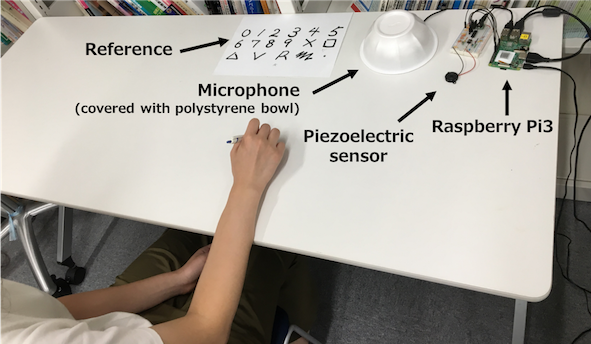
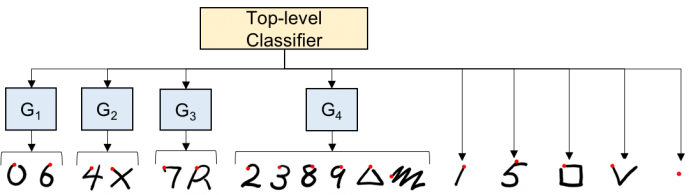
最初の川戸君(2020年3月博士前期課程修了)の論文は,机の上を指でなぞったときの音で0から9の数字,×,□,△,✓,R,m,・の17文字を識別するためのデバイスとデータ処理方法について考案したものです.認識方法は,従来からあるfeature engineering方式とニューラルネットワークによるfeature learning方式を比較し,さらに認識器の構成も2段階構成と1段階構成を比較しました.その結果,2段階構成のfeature engineering方式を用いることでも最良の0.854の精度(F値)を達成し,近年浸透著しいニューラルネットワークベースの手法が必ずしもベストではないことを示しました.行動認識のようなラベル付きデータを大量に得ることが困難な環境では,注意深く設計した特徴量を用いるfeature engineering方式が良いことが示唆されます.
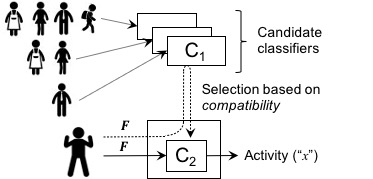
2番目のVu(社会人博士3年)さんの論文は,スマホなど個人が携帯するデバイス上で行動認識を行う際に,一番最初に利用者から行動データを提供してもらい,既存の分類器の中から相性が良いものを選んで利用することで高精度な分類を実現するという本研究室で提案するCompatibility-based Classifier Personalizationと呼ぶ手法に関するものです.昨年発表した下記の論文では,最初に対象とする全ての行動のデータを提供してもらうことを前提としていましたが,種類が多いと利用者の負担が増大することが課題でした.今回発表した論文では,事前にハイパーパーパラメータチューニングの要領で収集すべき行動群を絞り込むことで,50%から70%程度の負担で済むことを示しました.
令和元年度 工学研究院科研費採択率向上施策によるファシリテータ支援において藤波が先端情報科学部門内の高い採択率に貢献したとして表彰されました.昨年度に引き続きの受賞です(任期2年).
M2の柴山さんが下記の論文を第19回情報科学技術フォーラム(FIT2020)で発表し,FIT奨励賞を受賞しました.
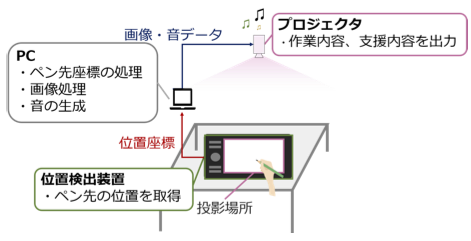

この研究ではプロジェクタを通じてトレース作業を支援する際に手により投影情報が隠れてしまうというハンドオクルージョン問題への対処(ハンドオクルージョン管理)を目的としています.実際の作業場所からやや離れた場所への見本投影や,トレースからのズレや変点の音による通知や,そのハイブリッド型などを提案し,ユーザ評価によりそれらを比較評価しました.
その結果,複雑な図形では提案した管理方法を用いたいずれの場合においても作業時間が延びることが判明しました.単純な図形は一部の図形においてハイブリッド方式のみ作業時間が延びることが確認されました.また,記憶で補完できない図形は提案した管理方法を用いたいずれの場合においてもトレース精度が向上することが判明しました.両実験ともに視覚と聴覚を組み合わせたハイブリッド方式がユーザに多く好まれることが確認されました.単純な図形やなじみのある図形ではユーザは視覚支援をあまり利用せずに作業し,なじみがない図形の場合は視覚支援を利用することが判明しました.
M2の齋藤君が下記のタイトルでInternational Conference on Activity and Behavior Computing (ABC)で発表を行いました.
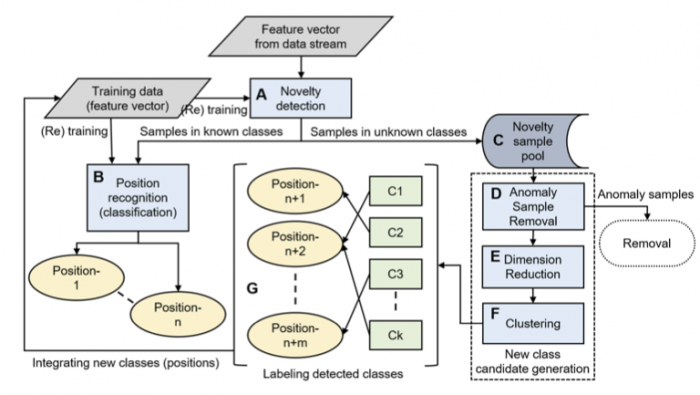
システムが未学習の携帯機器の所持位置をユーザが利用している最中に検出して,認識対象に追加するフレームワークを研究中です,これまで上の図のAについて新規性検出(Novelty Detection)技術を使う方法,とくにアンサンブル型の検出器の利用を提案してきましたが,本発表ではその先のD(異常サンプル除外), E(次元削減), F(クラスタリング)の実現方法を検証しました.特にクラスタリングについてはクラスタ数を決定する方法を検討しました.
M1の宅野君が下記のタイトルで情報処理学会UBI研究会第66回研究発表会で発表を行いました.本来は2020年3月開催の第65回でポスター発表にエントリしていたのですが,CoVID-19の爆発的感染で発表ができなかったために,第66回(オンライン)の中でバーチャルポスター発表という形で発表されました.なお,本研究は昨年度から開始した農学部との連携プロジェクトの中での最初の発表となります.
本年度は,博士後期課程3名,博士前期課程9名,学部4年5名,研究生1名,秘書1名の体制で研究を進めていきたいと思います.
当研究室より5名の修士(大月,片山,川戸,豊増,前原)と5名の学士(青木,河合,国方,宅野,氷見)が卒業しました.学部生のうち青木,国方,宅野は生物システム応用科学府(BASE )生物機能システム科学専攻 博士前期課程に進学します.
M1の齋藤光明君が2019年度情報工学専攻 奨励研究賞を受賞しました.
情報処理学会シンポジウム「インタラクション」にて修士2年の大月さんが下記のオンラインデモ発表を行いました.
大月理沙,藤波香織;“CrosSI:作業領域拡張のための水平・垂直タッチディスプレイ連携機構”,情報処理学会インタラクション2020 インタラクティブ発表,2020年3月11日.
情報処理学会第82回全国大会(CoVID-19によりオンラインでの開催)にて以下の5件の発表を行い,川戸君が学生奨励賞を受賞しました.2010年に初めて受賞者が出てから22件(21人)目です.
2020年度の卒研配属生が決定しました(井澤冬馬,小林美月,千葉祐二,古瀬大輝,前橋辰哉).
東京農工大学内 農工融合研究支援制度(通称TAMAGO)に,藤波が分担者として参加する研究「野生動物に関する情報のAIを用いたデータ解析手法の開発」(代表:小池伸介 農学研究院准教授)が採択されました.(産学連携室による紹介)
藤波班は,これまで人間を対象として培ってきたウェアラブルセンサによる行動認識技術を用いて野生動物の行動認識に協力し,人間と野生動物の共存に貢献することを目指します.