本研究室からの論文2篇が論文誌(Sensors and Materials)に採録され,オンラインで公開されました.
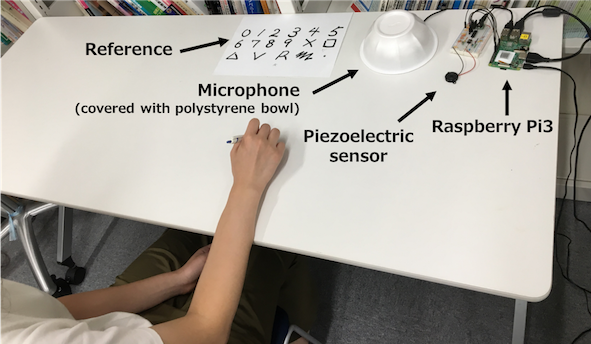
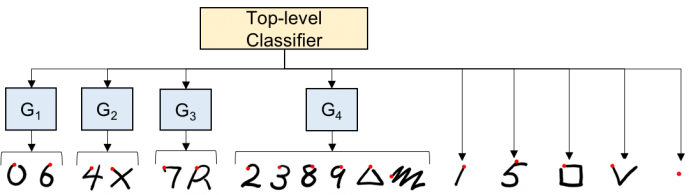
Miki Kawato and Kaori Fujinami; “Acoustic-sensing-based Gesture Recognition Using Hierarchical Classifier”, Sensors and Materials, Vol. 32, No. 9, pp. 2981-2998, 2020. [link]
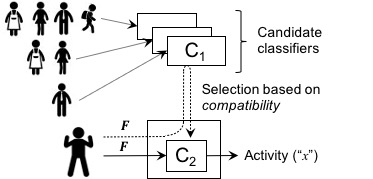
Trang Thuy Vu and Kaori Fujinami; “Personalizing Activity Recognition Models by Selecting Compatible Classifiers with a Little Help from the User”, Sensors and Materials, Vol. 32, No. 9, pp. 2999-3017, 2020. [link]
Trang Thuy Vu and Kaori Fujinami; “Understanding Compatibility-based Classifier Personalization in Activity Recognition”, In Proceedings of the 1st International Conference on Activity and Behavior Computing (ABC2019), pp. 97-102, May 2019.
Trang Thuy Vu and Kaori Fujinami; “Examining Hierarchy and Granularity of Classifiers in Compatibility-based Classifier Personalization”, In Proceedings of the 2019 IEEE 8th Global Conference on Consumer Electronics (GCCE 2019), pp. 553-554, 16 October, 2019.