博士後期課程1年の胡伊端さんが,令和5年度 東京農工大学学生表彰(学術研究活動部門(学術研究活動において,特に顕著な業績を挙げ,学会又は社会的に高い評価を受けた場合に授与))を受賞し,入学式にて表彰されました.
投稿者: tuat-dlcl
保護中: 【OB/OG】2023年度卒業式集合写真
対外発表・受賞(第86回情報処理学会全国大会)
情報処理学会第86回全国大会(神奈川大にて開催)にて以下の9件の発表を行い,村儀君,菊地君,佐々木君(M2),長瀬君(B4)が学生奨励賞を受賞しました(★印).2010年に初めて受賞者が出てから41件(34人)目です.また,2012年度から12年連続受賞です.村儀君は3年連続,菊地君は2年連続の受賞です.
- 志田原萌美,早川侑花,辻愛里,藤波香織.床拭き掃除中の道具と身体動作計測によるメンタルワークロード推定,情報処理学会第86回全国大会,2024年3月17日.
- ★長瀬清之助,村儀天星,辻愛里,藤波香織.購買時の頭部動作および歩行軌跡計測にもとづく迷い状態の分類,情報処理学会第86回全国大会,2024年3月17日.
- ★菊地怜,辻愛里,藤波香織.顔アイコンを用いた偽の聴衆反応提示によるオンライン講演者の快適度向上支援,情報処理学会第86回全国大会,2024年3月16日.
- 都築あい,百合草優伽,辻愛里,藤波香織.植物の育成および他者とのインタラクションを用いたスマートフォンの使い過ぎ抑制支援,情報処理学会第86回全国大会,2024年3月16日.
- ★村儀天星,辻愛里,藤波香織.手と視線の遷移を活用した組立作業中の迷いの有無と種別判定システム,情報処理学会第86回全国大会,2024年3月16日.
- 田畑実由太,倉田寛大,辻愛里,藤波香織.複合現実空間における行動支援のための日常物エージェントとの愛情醸成,情報処理学会第86回全国大会,2024年3月15日.
- 矢野明日香,山中瑞稀,辻愛里,藤波香織.VR体験中のコンテキストとユーザの反応を考慮した実世界アウェアネス支援,情報処理学会第86回全国大会,2024年3月15日.
- ★佐々木耕平,辻愛里,藤波香織.複合現実空間における能動的触知覚を導入した記憶の宮殿型暗記支援システム,情報処理学会第86回全国大会,2024年3月15日.
- 倉田寛大,辻愛里,藤波香織.マルチモーダルデータによるプログラミング作業時の困惑状態推定,情報処理学会第86回全国大会,2024年3月15日.
対外発表(UBI81)
M2の菊地君,佐々木君,村儀君,田中さんが情報処理学会ユビキタスコンピューティングシステム研究会第81回研究発表会にて以下の発表を行いました.
- 菊地怜,辻愛里,藤波香織.顔アイコンを用いたダミーフィードバックによるオンライン講演者の自己評価向上支援,情報処理学会ユビキタスコンピューティングシステム研究会 第81回研究発表会研究報告,Vol.2024-UBI-81 No.3,2024年2月29日.
- 佐々木耕平,辻愛里,藤波香織.複合現実感技術によるアクティブタッチを活用した記憶の宮殿型暗記支援システム,情報処理学会ユビキタスコンピューティングシステム研究会 第81回研究発表会研究報告,Vol.2024-UBI-81 No.4,2024年2月29日.
- 村儀天星,辻愛里,藤波香織.手と視線の遷移を用いた組立作業中の迷いの種別とレベル判定システム,情報処理学会ユビキタスコンピューティングシステム研究会 第81回研究発表会研究報告,Vol.2024-UBI-81 No.9,2024年2月29日.
- 田中咲希,辻愛里,Pekka Siirtola,Jaakko Suutala,Juha Röning,藤波香織.インクリメンタル学習の導入による黙読時の集中・非集中状態判別モデルの個人特化,情報処理学会ユビキタスコンピューティングシステム研究会 第81回研究発表会研究報告,Vol.2024-UBI-81 No.19,2024年2月29日.
卒論・修論審査会
2/15に卒論審査会が開かれ5名全員が合格しました(追記 2024−03−26:都築さんが知能情報システム工学科 優秀卒業論文賞を受賞しました.).
- 志田原萌美:慣性センサを用いた道具と身体の動作計測によるメンタルワークロード推定に関する研究
- 田畑実由太:複合現実空間における行動支援のための日常物エージェントとの愛情醸成に関する研究
- 都築あい:植物の育成および他者とのインタラクションを用いたスマートフォンの使い過ぎ抑制支援に関する研究
- 長瀬清之助:購買行動における頭部動作と歩行動作に着目した迷い状態の分類に関する研究
- 矢野明日香:VR体験中のコンテキストとユーザの反応を考慮した実世界アウェアネス支援に関する研究
2/16に修論審査会が開かれ4名全員が合格しました.
- 菊地怜:オンライン講演者の自己評価向上のための偽の聴衆反応提示手法に関する研究
- 佐々木耕平:複合現実空間における能動的触知覚を導入した記憶の宮殿型暗記支援システム
- 田中咲希:視線データに基づく集中状態・非集中状態識別モデルの領域特化に関する研究
- 村儀天星:手と視線の位置情報にもとづく組立作業中の迷いの種別とレベル判定に関する研究
対外発表(BTI研究会)
D1の胡伊端さんの行動変容システムの受容性を高めるためのシステムへの不信感払拭手法に関する研究を下記の研究会で発表しました.
胡伊端,辻愛里,藤波香織.行動変容システムの誤動作による不信感に対する寛容性醸成のための擬人化に関する研究,情報処理学会IoT行動変容学研究グループ第6回研究会(ポスター発表),2023年12月22日.
対外発表(HCGシンポジウム2023)
M1の早川侑花さんが以下のタイトルで,電子情報通信学会ヒューマンコミュニケーショングループシンポジウム(HCGシンポジウム2023)で発表しました.
早川侑花,田中咲希,辻愛里,山本淳一,藤波香織.自己効力感の予測に向けた予期的注視を表す視線特徴と機械学習モデルの検討〜回転変換マウス使用中のデータから ~,HCGシンポジウム2023,2023年12月12日.
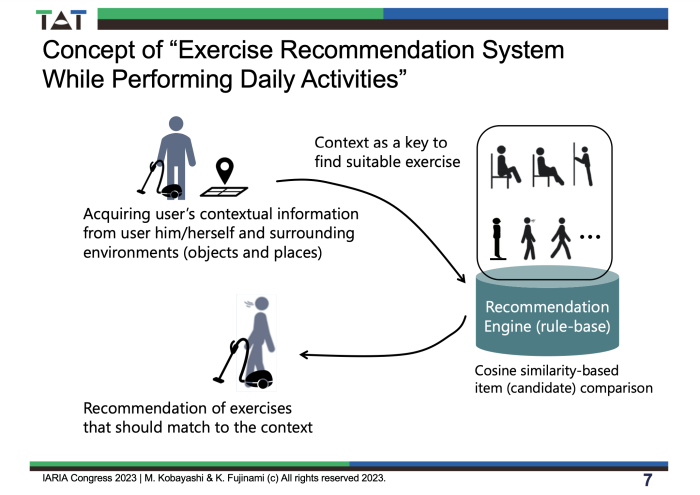
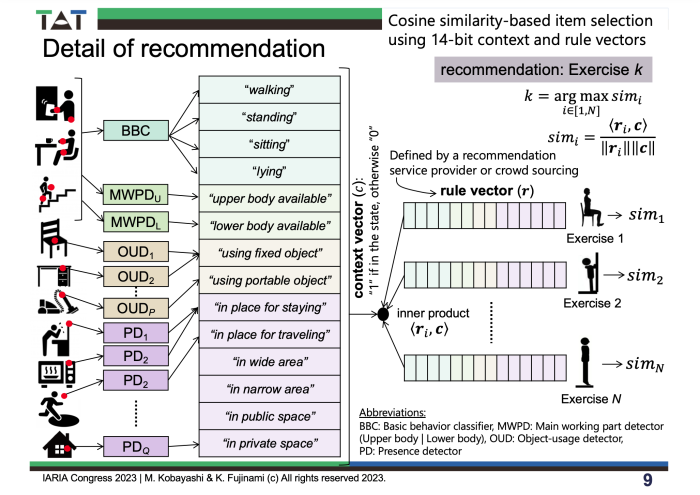
対外発表(IARIA Congress 2023)
2023年3月博士前期課程修了生の小林美月さんの研究を下記の学会で発表しました.
Mizuki Kobayashi and Kaori Fujinami, “An Exercise Recommendation System While Performing Daily Activities Based on Contextual Information”, In Proceedings of the 2023 IARIA Annual Congress on Frontiers in Science, Technology, Services, and Applications (IARIA Congress 2023), pp. 188-195, 13-17 November 2023. [paper link][slides link]
研究助成採択(カシオ科学振興財団)
辻助教が代表を務める研究課題(“実空間課題における予期的注視を用いた自己効力感の定量的計測にむけた巧緻性計測デバイスの開発”)が(公財)カシオ科学振興財団の第41回(令和5年度)研究助成に採択されました(財団HP).「自信のほど」を表す自己効力感を客観的に評価するために,予期的中止と呼ばれる視線特性に着目してこれまでPCのスクリーン内で基礎的検証を行なってきたものを,実空間での作業に拡張するための実験装置を開発します.
3年生が配属されました.
当研究室18期生となる3年生5名が配属されました(髙野耀希,高橋巧三,時野谷芽来,徳安史香,船原優人).
研究助成採択(大川情報通信基金)
(公財)大川情報通信基金 2023年度研究助成に藤波が代表をつとめる“異種センサ統合と能動学習による組立作業時の高精度な迷い推定”の研究課題が採択されました.視線と手の動きを連動して作業中の迷いを検出します.さらに,機械学習手法の一つである能動学習を取り入れ,逐次的に精度を向上する手法を開発します.
対外発表・受賞(GCCE2023)
博士1年の胡さんと修士1年の山中さんが,奈良市で開催されたIEEE Global Conference on Consumer Electronics (GCCE2023)で以下の研究成果の発表を行いました.このうち胡さんの研究がExcellent student paper award (Silver prize)を受賞しました(学会HP,大学HP).
- Yiduan Hu, Airi Tsuji, and Kaori Fujinami, “Anthropomorphism for Improving User Tolerance to System Errors in Environmental Behavior Change,” In Proceedings of the 2023 IEEE 12th Global Conference on Consumer Electronics (GCCE 2023), pp. 60-64, 10 October, 2023.
- Mizuki Yamanaka, Airi Tsuji, and Kaori Fujinami, “Gaze-Guiding Agents That Support Parts Search While Watching Instructional Videos for Assembly Tasks,” In Proceedings of the 2023 IEEE 12th Global Conference on Consumer Electronics (GCCE 2023), pp. 65-69, 10 October, 2023.
対外発表(ABC’23)
修士2年の田中さんが視線活動による人間の集中状態識別の研究に関して以下の発表を行いました.
Saki Tanaka, Airi Tsuji, and Kaori Fujinami, “Eye-Tracking for Estimation of Concentrating on Reading Texts”, In Proc. of the 5th International Conference on Activity and Behavior Computing (ABC2023), 8 September 2023.
対外発表(FIT2023/農業環境工学関連学会)
社会人博士課程の寺田憲司さんが以下の学会で発表しました.
- 寺田憲司,藤波香織,木下研吾.不整地対応小型ローバーを用いた病害予測観測手法の検討,農業環境工学関連学会2023年合同大会,2023年9月.
- 寺田憲司,藤波香織.センシング農業ローバーを用いたマルチモーダル観測による桑畑の病害観測手法の検討,第22回情報科学技術フォーラム(FIT2023),2023年9月.
修論審査会
7/26に9月修了のための修士論文審査会が開かれ,1名が合格しました.胡さんは博士後期課程で引き続き研究を行うことになっています.
- 胡伊端:A study of anthropomorphism for improving user tolerance to system errors in environmental behavior change(環境配慮行動への変容システムの誤動作に対する寛容性醸成のための擬人化に関する研究)
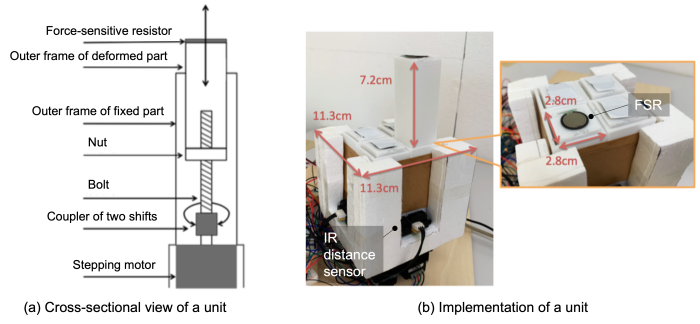
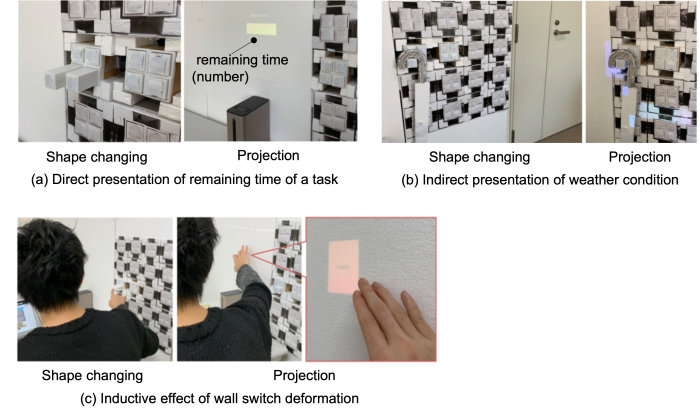
対外発表・受賞(HCII2023)
OB穴久保拓磨君の研究を以下の国際会議で発表し,最優秀論文賞を受賞しました(こちら).
Takuma Anakubo and Kaori Fujinami, “DeforVerFace: Modular Linear-Deformable Vertical Surface”, In Proc. 11th International Conference on Distributed, Ambient and Pervasive Interactions (DAPI2023), an affiliated conference with HCI International 2023 conference, 24 July 2023. [link].
進学情報サイト「データサイエンス百景」に取り上げられました.
情報技術を用いて「ウェルビーイング」を実現するというトピックで当研究室の取り組みの一部が紹介されました.(【こちら】からご覧になれます)
論文採録(Sensors and Materials)
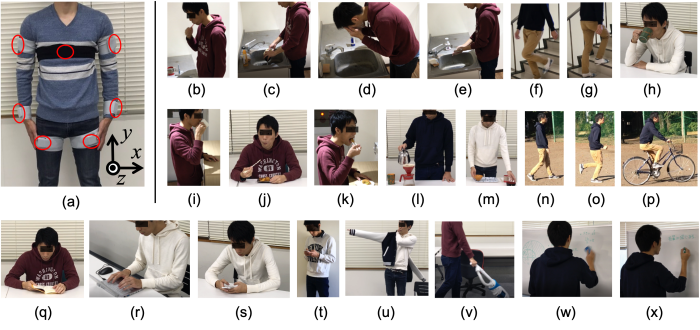
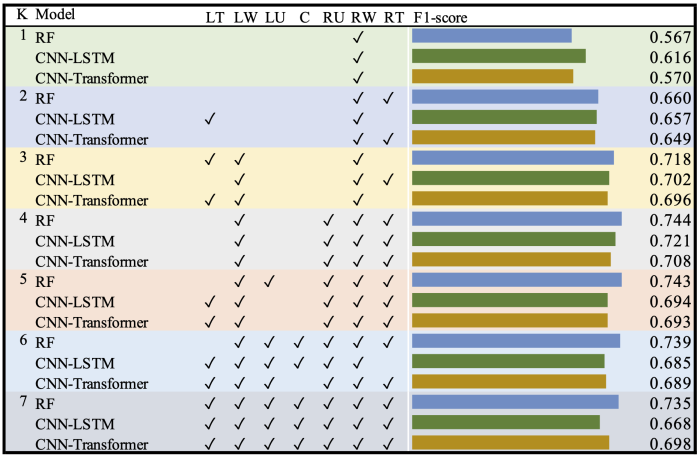
2021年度博士前期課程修了生の段雨豪君の研究が論文誌Sensors and Materialsに採録され,掲載されました.身体の最大7カ所(図1 (a))に装着した加速度センサで図1((a)から(x))のような23種の日常行動を認識するためのモデル(RandomForest,CNN-LSTM,CNN-Transformer)とセンサ装着位置の組み合わせ(1個から7個全ての計127通り)を調査しました(図2).図2は全行動の平均が載っていますが,論文中では行動ごとの結果と認識モデルやGPU利用有無による処理速度の比較も示されています.これらの情報は,利用可能なセンサの数や装着場所,重点的に認識したい行動,オンライン処理性能などの要件に合わせて認識モデルや装着場所を選ぶ指針になります.
- Yuhao Duan and Kaori Fujinami. Effect of combinations of sensor positions on wearable sensor-based human activity recognition, Sensors and Materials, Vol. 35, No. 7 (1), pp. 2175-2193, 2023. [link]
対外発表・受賞(UBI78)
M2の村儀君が情報処理学会ユビキタスコンピューティングシステム研究会第78回研究会にて次の発表を行いました.(2023-07-07追記:学生奨励賞を受賞しました)
- 村儀天星,渡邊昭信,辻愛里,藤波香織.手と視線の連動性の活用と分類の階層化による組立作業中の迷いの検出と分類,情報処理学会ユビキタスコンピューティングシステム研究会 第78回研究発表会,情報処理学会研究報告 Vol. 2023-UBI-78 No. 3,pp. 1-8,2023年5月24日.
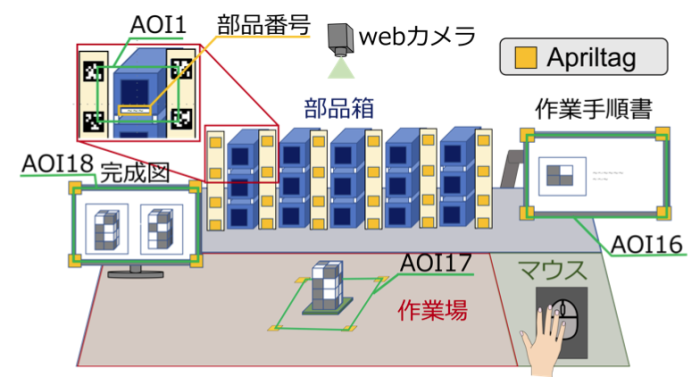
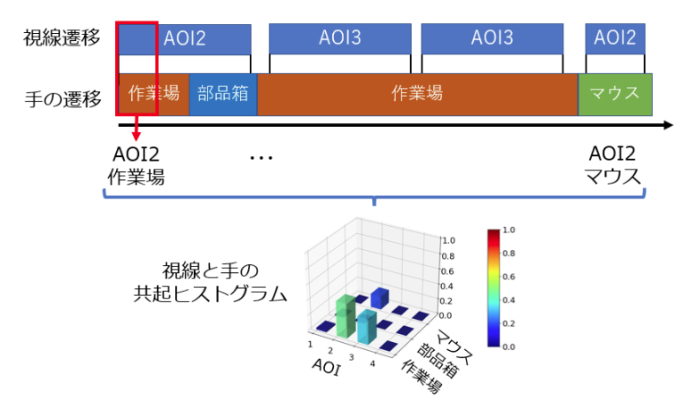
2022年9月のUBI75研究会で発表した研究は視線遷移だけでしたが,今回は手の動きも組み合わせて,組立作業中の迷いの状態を推定することを試みました.AOI(関心領域)に視線と手が同時に入る度合い(共起度合い)をヒストグラムに表し,ここから特徴量を算出して機械学習により分類器を構築しています.視線遷移だけの場合に0.700であったF値は,手の遷移を組み合わせることで0.735まで向上すること,タスクの違いをほとんど受けないことを確認しました.
対外発表(ETRA2023)
M1の早川さんが視線追跡とその応用に関する国際会議でポスター発表を行いました.
Yuka Hayakawa, Saki Tanaka, Airi Tsuji, Kaori Fujinami, and Junichi Yamamoto, “A Preliminary Investigation on Eye Gaze-based Estimation of Self-efficacy during a Dexterity Task”, accepted as a poster/technical abstract in the 2023 ACM Symposium on Eye Tracking Research & Applications (ETRA’23), Article No. 32, pp. 1-2, 1 June 2023. [link]
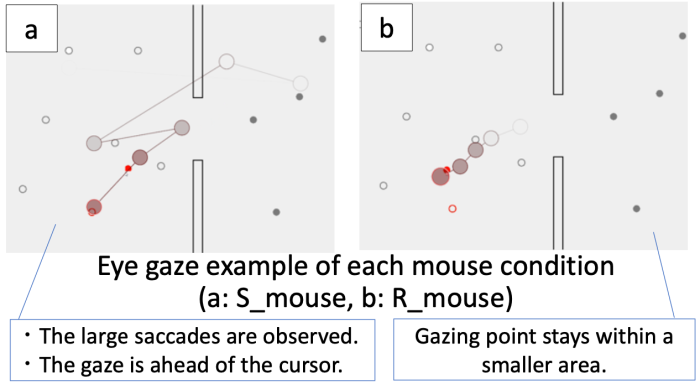
2種類のマウスを用いてスリットの右側から左側の赤井縁取りの○に向けて小さな赤い●を移動するタスクを実行したときの,視線の変化(大きな円の色が濃いほど新しい固視を表します)が上の図です.aは使い慣れたマウスなのでマウスに固視が先行しますが,bは意図的に移動方向と135度異なる方向に移動する特殊なマウスで使い慣れていないため,マウスカーソル周辺をじっと見ていることが分かります.手(マウスカーソル)の動きに視線が先行する現象を「予期的注視」と呼び,自己効力感の程を笑わすと考えられます.つまり,自信があると目は手元ではなく移動の先を見るということです.本研究ではこの予期的注視の定量化手法を考案することを目指しています.それにより,リハビリや組立などの手先の器用さを要求する作業を実施する人に対する適切なサポートを与えることが可能になると考えています.